
脉冲回响
拆解智能化的内涵
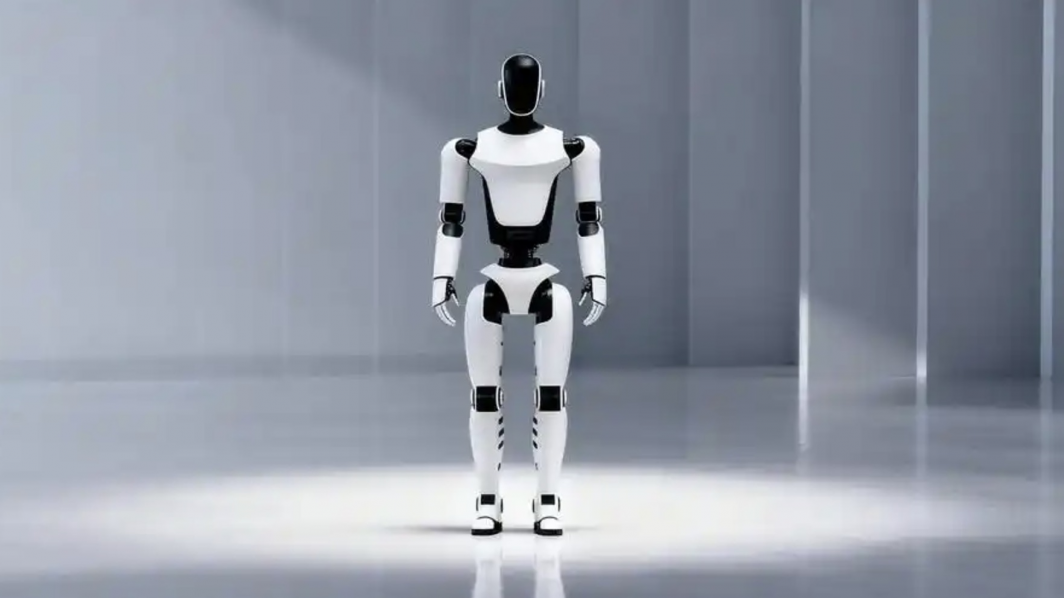
拆解智能化是指,针对非结构化的拆解环境,通过对拆解对象的信息感知、推理、学习,形成决策、规划、控制、监督命令流,以大量数据的自主化流动,解决拆解过程的不确定性问题,实现高度自适应拆解。图 1 是拆解智能化的分级。
资料来源:神经符号 AI 社区
智能拆解(L3、 L4)区别于自动化拆解(L2)的特征在于:
从依赖结构化数字模型到非结构化信息的感知、推理;
从确切已知对象到多品类、未知场景的自适应;从人的决策到智能体的自主决策;
从基于模型的预先编程控制到基于知识的学习、交互、控制;
从独立工作模式到基于云计算、云调度、云共享的协同模式。
智能拆解系统在非结构化的拆解环境中,通过对拆解对象的自主感知、拆解知识的自主学习、拆解工艺的自主决策、拆解动作的自主控制、拆解生态的自主协同,借助大量数据的自主流动,实现不确定性条件下复杂产品连接约束的高度自适应解除。
图 2 是一个知识驱动的柔性混流拆解系统示意图。柔性混流拆解系统由若干独立的智能拆解工作站构成,基于数字孪生技术,通过云端化的拆解工艺智能决策与规划系统、拆解物料信息管控与生产资源智能化调度系统,进行拆解流程的动态决策、动态规划和柔性混流拆解系统的动态配置、动态优化,实现复杂动态拆解场景下, 结构和拆解工艺相似、多品种小批量报废产品的高效、柔性、绿色拆解。

资料来源:神经符号 AI 社区
面向智能拆解的神经符号 AI 架构
机器人控制技术正沿着显式模型、隐式模型和混合模式三条路径不断演进。
混合模式控制的目的在于融合显式模型和隐式模型控制的优势,以寻求在安全性、稳定性、实时性、泛化性上的最优解。这种模式借鉴了丹尼尔 卡尼曼(Daniel Kahneman)《思考,快与慢》关于系统 1 和系统 2 思维的概念。其中,系统 1 是快速、直觉、并行的;而系统 2 则是缓慢、谨慎、顺序性的思维。目前主要有两种混合模式:
(1) System 1(神经网络) +System 2(神经网络):这种模式是双系统理论的直接体现, 将“场景识别”和“动作控制”分别交给两个独立的神经网络来处理,分别训练后再进行融合,类似大小脑的协同工作。它借鉴了脑科学的原理,从网络结构设计入手, 有效弥补了完全依赖“端到端”网络的不足——既能显著减少训练所需的数据量,又能使动作网络更加轻量化,以满足实时性要求。此外,通过两个网络之间的嵌入(embedding)操作,还能提升系统的可解释性。不过,这种模式仍需大量数据进行训练,例如 VLM 与动作网络至少需要万亿级别的数据量。同时,幻觉问题仍未解决,其在特定领域之外的泛化能力也较为有限。
(2) System 1(预定义+神经网络) +System 2(符号+LLM):该模式即神经符号具身智能——基于对领域知识的深入理解, 在系统 1 与系统 2 中进一步拆分出神经谓词和动作原语,并通过动作原语组合完成任务。它不仅能最小化训练所需的数据量,还能满足实时性要求,同时遵循可信规划标准 PDDL,确保了安全性。然而,这种方法依然需要大量数据进行训练,且在特定领域外的泛化能力仍有待提高。
神经符号 AI 架构
面向智能拆解的神经符号 AI, 通过融合符号逻辑系统的推理能力和神经网络系统的感知、学习能力, 形成感知、学习、决策、控制“知行合一”,训练与推理“训推一体” 的可信人工智能框架。
资料来源:神经符号 AI 社区
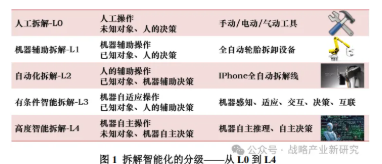
如图 3 所示,神经符号 AI 架构从下到上分为 6 层,分别是硬件层、 操作系统与网络层、 算法层、 规划层、 拆解工作站层与拆解产线层。
①硬件层: 涵盖支撑智能拆解的相关硬件,包括用于计算的各种运算处理单元,例如 xPU(CPU,GPU, NPU,神经拟态芯片), PLC 等,支撑操作的运动实体(机械臂, AGV 等)和机械部分(例如, 各种末端执行器)。
②操作系统和网络层: 负责解决通讯和调度等功能,例如 ROS 系统、 时间敏感网络(TSN) 等,这些系统能够确保上层的各个模块间高效的数据传递。
③算法层: 覆盖了常见的检测、分类、运动规划、力控等算法。
④规划层: 考虑到规划部分是系统的核心, 因此, 该架构将规划部分单独划分为一层。 这一层借助可微的动力学模型、 可微的滤波器等模块,将算法层的模块有机的组合在一起, 并封装成神经谓词和动作原语,然后, 基于这些原语进行符号层规划。 符号层规划可以采用逻辑推理或者基于 transformer 的方式完成。
⑤拆解工作站层: 在硬件、操作系统和网络、算法和规划层的支撑下,架构就可以有效的支撑起各种不同能力的拆解工作站、进而形成拆解产线。
⑥拆解产线层: 在产线层上, 通过数字孪生的实时物流仿真、实时混流调度、动态平衡优化,实现拆解资源的智能动态配置与自适应平衡控制。
除了上述 6 层,架构中还包含了数据管理、知识管理、持续学习等跨越不同层次的模块,以便有效支撑系统持续的进行自我升级和完善。
基于神经符号 AI 的机器人可微分任务和运动规划框架
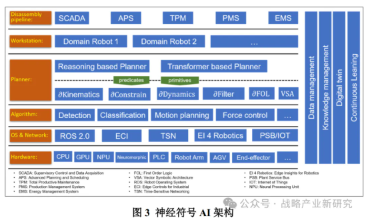
如图 4 所示,可微分任务和运动规划(Differentiable Task & Motion Planning,𝜕TAMP)框架利用可微分的世界模型,包括可微分的运动学、动力学、逻辑和稳固性模型,通过融合历史数据(经验)与知识,从而实现对任务完成方式的高准确性猜测。
𝜕TAMP 的工作原理类似于人类的直觉思维,其核心在于将运动学、动力学、逻辑和稳固性检测等关键组件以可微分模块的形式融入神经网络之中。这些可微分模块不仅作为网络的先验知识,而且在训练过程中直接对神经网络产生约束作用,从而形成了神经网络所依赖的“直觉”。
该设计思想使𝜕TAMP 能够在无需额外运动学、动力学求解器、碰撞和稳固性仿真器的情况下,直接生成满足运动学、动力学、碰撞和稳固性约束的采样点。此外,通过其他可微分运算操作,我们将这些加入的可微模块与传统神经网络紧密相连,确保整个框架的计算图连续且完整。这种无缝集成不仅可以提高计算效率,而且使得神经网络能够基于其“直觉”进行高质量的猜测采样,从而提升机器人运动规划的效率和质量。
资料来源:神经符号 AI 社区
基于神经符号 AI 的机器人具身智能控制架构
如图 5,通过逻辑符号运算与神经网络深度融合,引入神经谓词,将视觉、力觉信息和机器人位姿等连续空间状态映射到符号状态,自主选择并执行动作原语,自主完成拆解任务,形成感知、学习、决策、控制“知行合一”,训练与推理 “训推一体” ,可解释、可追溯“可信具身”的机器人具身智能控制架构,赋予机器人像人一样的直觉思维(系统 1)和逻辑思维(系统 2)能力,支持动态、非结构化拆解环境下的机器人实时拆解任务与运动规划。
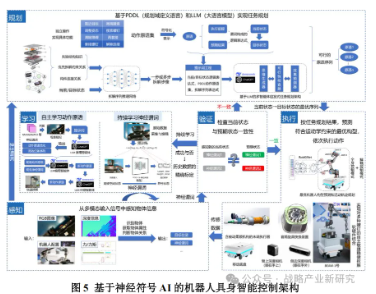
资料来源:神经符号 AI 社区
基于神经符号 AI 的机器人具身智能控制架构是一种基于拆解世界模型(神经谓词+动作原语)的具身智能系统,既是认识论、又是方法论,通过其自主性、可解释性、可学习性、可扩展性,实现“知行合一、训推一体、可信具身”的机器人自主拆解。
神经符号具身智能更广阔的应用场景
资料来源:神经符号 AI 社区
在各个智能化阶段中,持续学习和可靠性验证成为关键。
持续学习:通过与环境交互,系统能够持续更新自身能力,优化已有模块或获得新的能力,确保其适应不断变化的环境和任务需求。
可靠性验证:保证机器人行为的可控性与可信性,确保在任务执行过程中系统的安全和稳定。
数据是推动神经符号具身智能发展的核心驱动力。尽管现实世界中存在海量数据,但面向机器人领域的专用高质量数据却十分稀缺,获取难度也更大。
因此,必须在各个阶段的典型场景中,持续收集并有效利用来自机器人工作单元或其操作环境的数据,逐步构建完整的具身智能系统。这也正是推进神经符号具身智能发展的唯一可行路径。
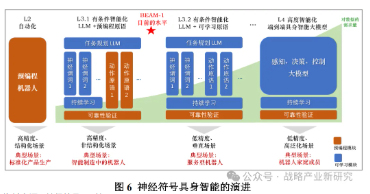
目前,基于神经符号 AI 的具身智能技术大致处于 L3.1(LLM+预编程原语)与 L3.2(LLM+可学习原语)之间。即,系统已经具备了利用语言模型(LLM)进行复杂环境感知与任务规划的能力,同时借助专家预编程的动作原语自主适应拆解环境。
而且,正逐步向更高的自主学习方向迈进,即通过强化学习、模仿学习等方式,实现具身智能系统能够自主生成、优化并适应不同场景的动作原语。这一演进反映出从应对高精度、非结构化环境中的不确定性问题,到适应低精度、垂直场景中定制化需求的技术转变。随着具身智能的进一步发展,行业将更好地满足个性化需求,提升生产效率,优化服务质量,并为更多行业的生产力提升与产业升级提供新动能。
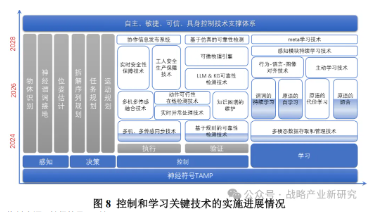
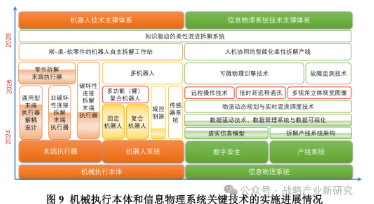
路线图 2.0 的实施进展
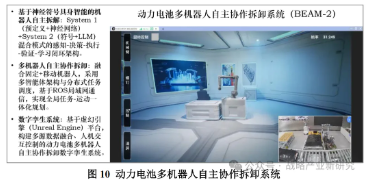
图 7—图 9 为基于神经符号 AI 的机器人拆解智能化技术路线图 2.0 的实施进展情况,包括自主敏捷、可信具身控制技术支撑体系,机器人技术支撑体系和信息物理系统技术支撑体系等三大技术体系展开的研究工作。通过研发动力电池多机器人自主协作拆卸系统,实现有人监督下的动力电池机器人自主拆解作业,保证较高的人工替代率,如图 10。该项目荣获“2025 英特尔人工智能创新应用大赛”个人赛道特等奖。
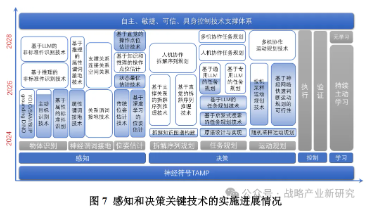
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
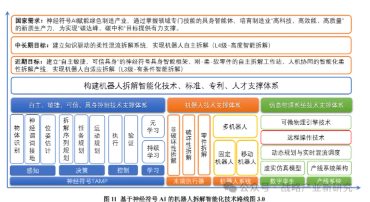
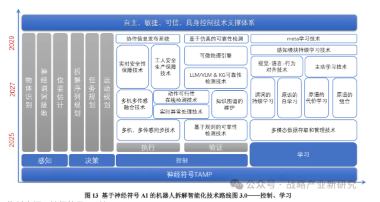
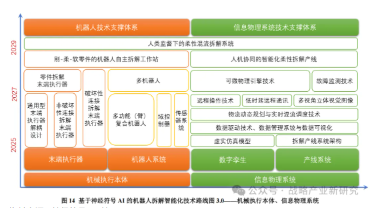
基于神经符号 AI 的机器人拆解智能化技术路线图 3.0
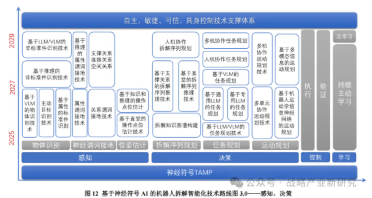
图 11—图 14 为基于神经符号 AI 的机器人拆解智能化技术路线图 3.0。
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
资料来源:神经符号 AI 社区
基于神经符号 AI 的机器人拆解智能化关键技术——感知
1.退役动力电池(零部件)物体识别关键技术
基于 VLM 和属性的物体识别构成了基础感知层,分别从语义和特征层面理解物体,主动识别则通过主动改变视角来优化观测条件。面对未知或复杂情况,基于推理的技术利用上下文关系结合领域知识进行逻辑推断,最终,VLM/LLM 可作为一种综合求解器,分解并整合局部信息以识别复杂目标。这些技术共同构建了一个从被动感知到主动认知、从处理标准件到应对非标准件的完整技术体系。
2.神经谓词接地关键技术
谓词接地是指将抽象的谓词实例化为具体的、可操作的实体或对象的过程。在神经符号人工智能中,使用神经网络来实现谓词接地的过程,即利用神经网络来将任务规划系统中抽象谓词转变为真实情况的表征,使其能够在具体的环境中进行实际的推理和判断。根据谓词的不同,又可以细分为:属性谓词接地技术、关系谓词接地技术和基于推理的属性谓词接地。
属性与关系谓词接地作为基础,利用神经网络对多模态数据直接分类,分别确定物体状态和物体间关系。当视觉等信息不足时,基于推理的属性谓词接地则结合领域知识进行逻辑推断,弥补感知的局限。这些技术共同构建了一个将感知信号可靠转换为抽象符号、实现符号状态与具体环境之间可操作表征的完整技术体系。
3 退役动力电池的零部件位姿估计关键技术
基于直觉的操作点位估计技术:借助神经网络与可微计算技术的优势,该技术能够从海量操作经验中学习和捕捉知识与模式,并依据当前任务需求进行操作点位的精准估计。
基于知识和推理的操作点位估计技术:利用领域知识和推理能力来确定在哪些点位进行操作,能够完成特定的目标任务。
基于神经符号 AI 的机器人拆解智能化关键技术——决策
1 拆解序列规划关键技术
知识图谱构建提供了结构化的领域知识基础;基于支撑关系的推理利用图谱进行逻辑推导,确保步骤合理性;基于直觉的推理则借助神经网络处理复杂不确定场景。最后,人机协作规划实现了任务层面的智能分工与协调。这些技术共同构建了一个融合知识驱动与数据驱动、兼顾确定规则与不确定场景处理能力的完整技术体系。
2 任务规划关键技术
基于 LLM/VLM 的规划构成核心规划层,通过通用、专用模型及视觉语言融合,将指令转化为可执行规划。人机协作规划在此基础上实现任务层面的智能分工与协调,而多机协作规划进一步扩展至系统层面,实现资源与进度的全局优化。这些技术共同构建了一个从单机智能到群体协作、从指令解析到系统优化的完整技术体系。
3 运动规划关键技术
基于运动学神经网络的规划构成了高效敏捷的底层基础;多模态信息规划通过融合感知数据增强了规划的安全性与可靠性;多单元协作规划实现了机器人内部各执行器的协调控制;多机协作规划则进一步在系统层面解决冲突与协同问题。这些技术共同构建了一个从单机敏捷控制到多机协同避障、从内部协调到系统优化的完整技术体系。
基于神经符号 AI 的机器人拆解智能化关键技术——控制
1 机器人执行关键技术
多机、多传感同步与融合技术是基础,确保了系统感知数据的一致性与全面性。动作可行性检测在此基础上对执行过程进行实时校验。实时安全与异常处理技术则构成了核心保障层,分别针对人员设备安全和突发异常进行主动防护与最小化干预。工人安全生产保障与协作信息发布系统最终实现了人机协作环境下的双向交互与流程规范。这些技术共同构建了一个从数据同步到人机交互、从动作校验到系统容错的完整技术体系。
2 机器人执行有效性验证关键技术
基于规则的检测与知识图谱维护构成了基础验证层,确保流程合规与知识更新及时、准确。LLM/VLM 与 KG 融合检测进一步引入常识推理,提升复杂情境下的判断力。可微物理引擎与基于仿真的检测则通过高保真模拟,在虚拟空间中预先验证任务可行性与安全性,实现从静态规则到动态模拟的跨越。这些技术共同构建了一个从静态规则到动态仿真、从知识驱动到数据驱动的完整技术体系。
基于神经符号 AI 的机器人拆解智能化关键技术——学习
多模态数据管理是学习的基础,为所有上层技术提供数据支撑。谓词与原语的自学习与组合构成了技能层,使机器人能自主进化基本能力。视觉-语言-行为对齐实现了高级指令理解与执行。而主动学习、感知模块持续学习与元学习则形成了系统的自我进化机制,通过选择性标注、多模态验证和智能校准实现持续优化。这些技术共同构建了一个从数据管理到自主进化、从技能学习到系统自适应的完整技术体系。
基于神经符号 AI 的机器人拆解智能化关键技术——执行本体与CPS
1 通用型拆解末端执行器设计关键技术
通用型拆解末端执行器解耦设计方法是核心基础,确保执行器与各类机械臂的即插即用。在此基础上,针对不同连接特性:非破坏性连接的末端执行器精准拆卸标准紧固件以保护零件;破坏性连接的末端执行器则通过切割、铣削等方式分离不可拆连接;而面向零件的末端执行器进一步扩展能力,覆盖刚性、柔性等各类零部件。这些技术共同构建了一个从通用适配到专用操作、从无损拆解到破坏分离的完整技术体系。
2 机器人系统关键技术
多功能复合机器人与多机器人系统构成了执行层,通过多臂与多机协同,灵活应对复杂任务与大型工件。传感器系统与域控制器则构成了感知与控制中枢,前者通过多模态融合提供环境认知,后者通过集成计算提升响应精度。刚-柔-软零件自主拆解工作站依托通用末端执行器,最终实现了对多样化零部件的精准操作。这些技术共同构建了一个从单体作业到群体协同、从感知控制到精准执行的完整技术体系。
3 退役动力电池拆解的信息物理系统关键技术
数字孪生是 CPS 的核心信息基础,构建了虚实映射与交互控制的框架。实时仿真优化与动态混流调度技术在此框架内实现数据驱动的资源动态配置与产线平衡;数据管理与故障监测则最终确保系统状态透明与稳定运行。
拆解产线是 CPS 的物理基础,构建了从远程干预到自主执行的闭环作业能力。远程操作与低时延通讯构成远程精准控制的基础,确保人类专家能实时介入;多视角立体视觉提供全景环境感知,为决策提供支持;可微物理引擎通过高保真仿真预演,保障操作可行性;最终,智能化柔性产线集成上述能力,实现自主拆解工艺的落地验证。这些技术共同构建了一个从虚拟映射到实时管控、从系统仿真到实体作业的完整技术体系。