
智慧枢纽
人形机器人零部件领域正呈现国产替代加速、技术快速迭代、成本逐步下行的整体趋势。2025年,在资本、政策和市场需求的共同驱动下,产业链各环节的成熟度显著提升,为人形机器人的规模化商用奠定了坚实基础。
产业链价值分布
高价值/高壁垒:
精密减速器 > 力传感器 > 丝杠 > 无框电机 > AI芯片
量大面广:
编码器、轴承、连接器、驱动器、电池
人形机器人零部件分类
一、核心零部件分类和应用
| 驱动系统 | ||
| 传动系统 | ||
| 感知系统 | ||
| 控制系统 | ||
| 能源系统 | ||
| 集成模组 |
二、其他重要零部件
🔧 驱动类
无框力矩电机 — 关节直驱核心 BLDC伺服电机 — 大关节驱动 驱动器/伺服驱动 — 电机控制
📡 传感类
编码器(绝对值/增量式)— 位置反馈 IMU(惯性测量单元) — 姿态平衡 关节扭矩传感器 — 力控反馈 深度相机/双目视觉 — 环境感知 激光雷达(LiDAR) — 导航避障
🧠 计算与控制类
AI推理芯片 — 端侧智能 运动控制芯片(MCU/FPGA) — 实时控制 通信模组 — EtherCAT/CAN总线
✋ 末端执行器
灵巧手总成 — 五指抓取 柔性夹爪 — 自适应抓取
🏗️ 结构件
碳纤维复合材料结构件 — 轻量化骨架 精密铸造件 — 关节外壳
⚡ 电气连接
高密度连接器 — 关节走线 柔性线缆/FPC — 弯折区域
人形机器人零部件分级分类内容
以下将人形机器人的零部件按整机-子系统-组件-关键器件层级进行梳理,并汇总为一份“BOM导览摘要”。核心零部件根据其对机器人基础运行、性能提升和功能扩展的重要性,划分为 A类(必需)/B类(重要)/C类(选配)。
一、BOM导览摘要
运动关节模组 (A类)
技术摘要:机器人的核心运动单元,通常集成了电机、减速器、编码器和驱动器,直接影响运动性能和成本。技术正朝着驱控一体化和标准化发展,以降低成本并提升可靠性。
厂商与供应链:天太机器人是核心厂商,其牵头制定的关节模组国家标准已于2025年8月实施。特斯拉Optimus的关节供应链也备受关注,潜在供应商包括在汽车领域已有合作的三花智控、拓普集团等。
成本与技术趋势:2025年出现显著成本突破。天太机器人发布的新一代关节模组单价首次进入三位数区间,同比成本降幅超50%,为人形机器人规模化普及奠定了基础。
灵巧手 (B类)
技术摘要:实现精细操作的关键执行器,被视为商业化的“最后一厘米”。国内技术路线百花齐放,传动方案以间接驱动为主。
厂商与供应链:主要分为两类:一是优必选、宇树科技等本体厂商自研;二是灵心巧手等专业零部件厂商,其出货量曾占全球高自由度灵巧手市场80%以上。
成本与技术趋势:2025年价格显著下降。例如,6自由度灵巧手价格从此前的3.5万元以上降至2万多元,加速了商业化应用。
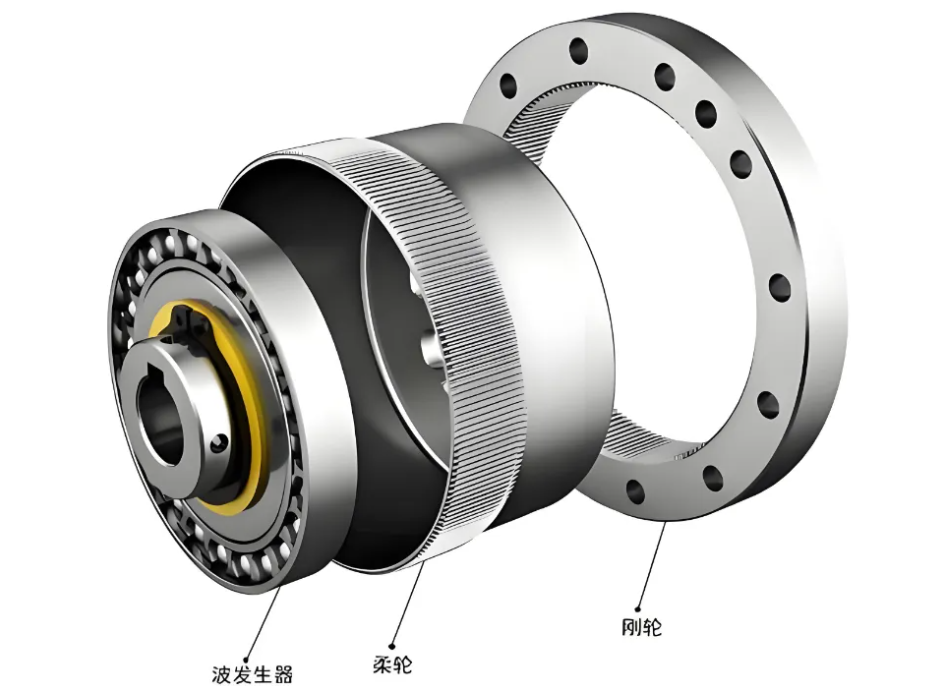
减速器 (A类)
技术摘要:保证关节运动精度和输出力矩的核心部件。谐波减速器和行星减速器是当前主流方案,不同本体厂商根据需求侧重选用。为追求轻量化,摆线针轮等新型减速器也在探索中。
厂商与供应链:国内谐波减速器龙头绿的谐波是主要供应商。行星减速器厂商包括中大力德、双环传动等。
电机 (A类)
技术摘要:机器人的“肌肉”,主要为无框力矩电机和空心杯电机。前者用于大关节提供大力矩,后者用于小关节(如手指)实现轻巧、快速响应。
厂商与供应链:江苏雷利(空心杯电机)、鸣志电器、步科股份等是行业内的主要参与者。
传感器系统 (A/B类)
技术摘要:机器人的“感官”,主要包括:
视觉传感器 (A类):主流方案包括TOF、多目视觉,并常辅以激光雷达或超声波传感器。 力觉传感器 (B类):尤其是六维力传感器,价值量高,对实现柔顺控制、精密装配至关重要。 电子皮肤 (C类):基于压阻、电容等原理的触觉传感器,行业正向功能集成方向发展。
厂商与供应链:六维力传感器领域,东华测试、柯力传感等厂商受到关注。
计算与决策系统 (“大脑”) (A类)
技术摘要:机器人的智能核心。2025年的技术焦点是VLA(视觉-语言-动作)大模型,它能让机器人理解复杂指令并规划全身动作。具身智能大模型是提升泛化能力的关键。
厂商与供应链:智平方被业内认为是全球VLA大模型的领跑者之一。英伟达也提供了如Jetson Thor等机器人开发平台。
成本与技术趋势:制约机器人规模化应用的主要瓶颈已从硬件转向“大脑”。AI大模型的成熟度是决定机器人能否执行复杂任务的关键。
结构件与轻量化材料 (B/C类)
技术摘要:包括机身骨架、外壳等。行业对轻量化的关注度持续提升,以延长续航和提升运动性能,材料涉及高强铝合金、碳纤维复合材料等。
热管理系统 (B类)
技术摘要:确保电机、控制器、电池等关键部件在适宜温度下工作。冷却技术包括风冷、液冷和相变冷却,需根据部件功率密度选择。
能源系统 (A类)
技术摘要:主要为高能量密度电池包,是机器人续航能力的决定因素。
二、整机层级零部件详述
层级1:整机
这是完整的人形机器人产品,例如特斯拉Optimus、优必选Walker系列、宇树科技H1等。
层级2:子系统
人形机器人通常由以下五大子系统构成:
运动执行子系统:负责所有肢体运动,包括腿部、臂部、手部和躯干关节。 感知与传感子系统:负责收集内外部环境信息,是机器人“感知世界”的基础。 智能决策与控制子系统:负责处理信息、做出决策并生成控制指令,是机器人的“大脑”和“小脑”。 结构承重与支撑子系统:构成机器人的物理骨架和外形。 能源与热管理子系统:为整机提供动力并管理运行温度。
层级3 & 4:组件与关键器件
以下将子系统的构成展开至组件和关键器件层级。
运动执行子系统 关节组件 (A类):运动子系统的核心,通常以关节模组的形式存在,集成了多个关键器件。
关键器件:电机 (A类):动力源。 关键器件:减速器 (A类):增矩降速,保证精度。 关键器件:编码器 (A类):测量关节转角或速度,实现闭环控制。 关键器件:制动器 (B类):在断电时锁定关节,保障安全。 关键器件:驱动器 (A类):电机的控制单元,驱控一体化是趋势。 关键器件:力矩传感器 (B类):测量输出力矩,实现力控。
灵巧手组件 (B类):末端执行器。
关键器件:微型电机/驱动单元 (A类):通常为多个空心杯电机。 关键器件:手内传感器 (B类):指尖力觉、触觉传感器。
感知与传感子系统 环境感知组件 (A类):
关键器件:视觉传感器 (A类):如深度相机、激光雷达(LiDAR)。 关键器件:超声波/红外传感器 (B类):用于近距离避障。
本体状态感知组件 (A类):
关键器件:惯性测量单元(IMU) (A类):感知机身姿态、加速度。 关键器件:关节编码器 (A类):见上文。 关键器件:六维力/力矩传感器 (B类):安装在脚踝或手腕,用于测量交互力。
触觉感知组件 (C类):
关键器件:电子皮肤 (C类):赋予机器人触觉。
智能决策与控制子系统 中央计算组件 (“大脑”) (A类):
关键器件:AI计算芯片/模组 (A类):运行VLA等具身智能大模型。 关键器件:域控制器 (A类):集成化的控制计算平台。
运动控制组件 (“小脑”) (A类):
关键器件:实时控制芯片 (A类):负责底层伺服控制和运动规划。
软件与算法组件 (A类):
操作系统 (A类):机器人专用OS。 具身智能大模型 (A类):如VLA模型,是智能化的核心。 仿真与训练平台 (B类):用于在虚拟环境中训练和验证算法。
结构承重与支撑子系统
机身骨架组件 (A类):由轻量化材料(如铝合金、碳纤维)制成。
外壳与蒙皮组件 (C类):提供保护、美观及缓冲。
能源与热管理子系统
动力电池组件 (A类):
关键器件:电池包 & BMS (A类):提供能源及电池管理。
热管理组件 (B类):
关键器件:散热模组 (B类):包括风扇、液冷板、热管等。