
全栈 007
磁流变(MR)材料是一类在外加磁场下可逆改变流变和力学性能的智能材料,由软磁性颗粒分散于流体或弹性体中组成。磁场作用时,颗粒间的偶极相互作用使其形成纤维状结构,从而提高材料的黏度和刚度。各向异性磁流变弹性体因具有预设的纤维状磁结构,可在磁场下产生方向性响应,如剪切增强和旋转驱动,但受限于弹性体基质的刚性,需要较强磁场才能发挥效果,存在安全隐患。近年来,含硬磁颗粒的磁性纤维在软体机器人、医疗器械和智能纺织领域展现潜力,但其作为织物驱动器仍面临磁相互作用、磁化精度不足、织物结构松散及磁化设备空间受限等问题,导致磁化图案易错位且运动控制不稳定。
据此,香港理工大学陶肖明教授、蒲俊宏助理教授团队提出了一类可响应矢量刺激的磁流变纤维材料,其设计基于一种融合纺织结构力学与软磁材料磁学特性的工程模型。成功批量制备出具备优异力学与磁学性能的软磁性高分子复合纤维,并将其组装成同心螺旋状纱线结构。该纱线可在外加磁场方向和强度的调控下,产生显著的弯曲与刚度增强效应,从而实现具备多种驱动与强化功能的可定制智能织物。在此基础上,开发了多种创新应用,包括:用于个体湿度调节的主动通风织物、可适应不同形状与硬度物体的柔性抓取器,以及能远程操控并再现织物硬度与光滑触感的触觉手套。该研究为刺激响应型纤维材料的发展提供了新思路,使其从标量控制迈向复杂的矢量控制,开启了智能纺织技术创新的全新篇章。 2025年11月5日,相关工作以 “ Vector-stimuli-responsive magnetorheological fibrous materials ” 为题在Nature上发表研究论文。蒲俊宏助理教授为第一作者兼通讯作者,陶肖明教授为共同通讯作者。
2025年11月5日,相关工作以 “ Vector-stimuli-responsive magnetorheological fibrous materials ” 为题在Nature上发表研究论文。蒲俊宏助理教授为第一作者兼通讯作者,陶肖明教授为共同通讯作者。 从左:陶肖明教授、蒲俊宏教授
从左:陶肖明教授、蒲俊宏教授
图文介绍
磁阻纤维材料能够将各向异性磁阻材料的矢量刺激响应特性与纺织品的柔韧性和多功能性相结合,从而产生一类变革性的矢量刺激响应纤维材料。此外,软磁磁阻纤维克服了硬磁纤维在纺织驱动器中的局限性,无需预磁化。这些磁各向异性且无基质的磁阻纤维材料,通过非粘合纤维组装,能够实现以往无法达到的高性能驱动和刚化功能(图1)。此外,纺织品的延展性和可编程性使得从二维织物到复杂三维(3D)纺织器件的无缝过渡成为可能,从而满足实际应用的需求。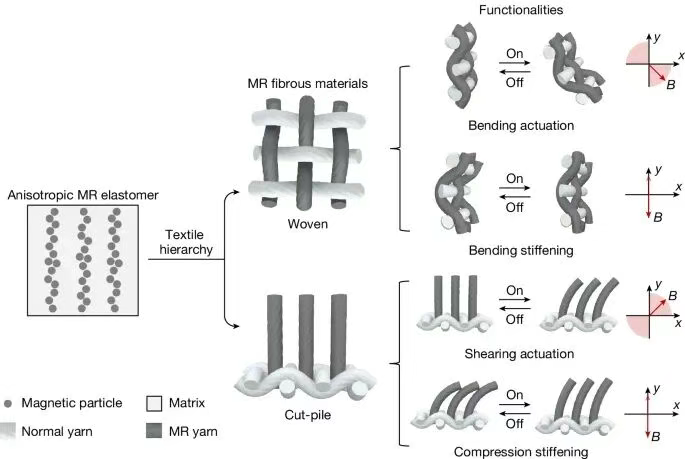 图1. 具有矢量刺激响应功能的 MR 纤维材料示意图
图1. 具有矢量刺激响应功能的 MR 纤维材料示意图
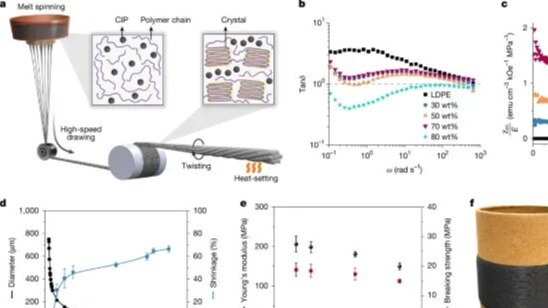
通过理性选择低密度聚乙烯作为聚合物基质,羰基铁粉作为磁性填料,利用双螺杆挤出机制备了填料分布均匀的复合材料。通过系统分析流变特性,确定了具有最高χₘ/E值(1.23 emu cm⁻³kOe⁻¹ MPa⁻¹ at 3 kOe)且可熔融纺丝的70 wt% CIPs复合材料(图2c)。采用熔融纺丝与原位高速牵伸工艺,将纤维直径拉至57 μm(图2d),同时提升了聚合物链取向性与CIP分布各向异性(图2a,d)。纱线由七根纤维捻合并经热定型制成,优化后的纱线具有高Ay/EIy(0.027 mN⁻¹)和显著磁各向异性(轴向与径向磁化比1.4 at 3 kOe;图2h,i),并展现出优异的柔韧性与耐久性(图2j)。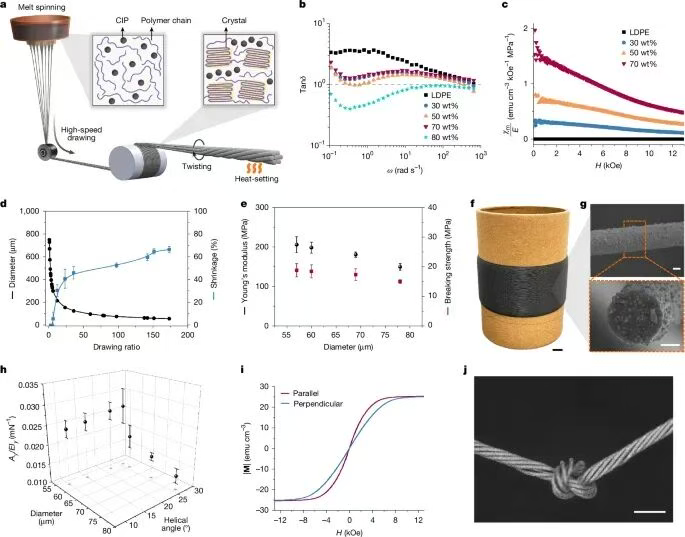 图2. MR 纤维和纱线的设计和制造
图2. MR 纤维和纱线的设计和制造
揭示了纱线在磁场中的两种主要工作模式:弯曲模式与硬化模式。当存在易轴与磁场方向的角偏差时,磁矩产生磁扭矩,引发弯曲力矩(Mbending),促使纱线对齐磁场或抵抗外力(图3a,d)。实验表明,不同长度的MR纱线在磁场下的弯曲角度与模型预测一致(图3b),其力矩密度随磁场增强而提高,最高达约7 N m kg⁻¹(300 mT;图3c)。在三点弯曲测试中,纱线弯曲刚度随磁场从0 mT增至280 mT提高了约30倍,从0.68 mN mm²升至20 mN mm²(图3e,f)。该性能提升除磁扭矩作用外,还源于磁化纱线内部螺旋纤维间磁吸引力所导致的摩擦增强。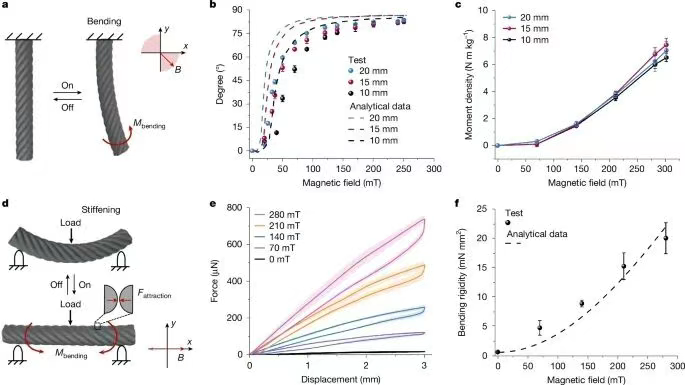 图3. MR 纱线的弯曲和加强性能
图3. MR 纱线的弯曲和加强性能
MR纱线被组装成平行取向的机织MR织物和垂直取向的割绒MR织物。机织织物中,由于纱线交织导致的结构屈曲,其力矩密度略低于单纱,但弯曲刚度随浮长增加而提高(图4b,c)。其中平纹织物因纱线间相互作用最低,性能最接近单纱,一块0.5 g的平纹MR织物在210 mT磁场下可支撑10 g重量(图4d)。割绒MR织物则在倾斜磁场下输出面内剪切力,在垂直磁场下调控面外压缩模量(图4f)。其剪切力与磁场强度及纱线密度成正比,密度为500 yarns cm⁻²时在280 mT磁场下产生110 mN剪切力(图4g);压缩模量可通过纱线密度调节,范围从0.45–8.3 kPa至1–22.5 kPa(图4h)。两类织物均表现出良好的耐久性,在约10,000次循环压缩后仍保持性能稳定(图4i)。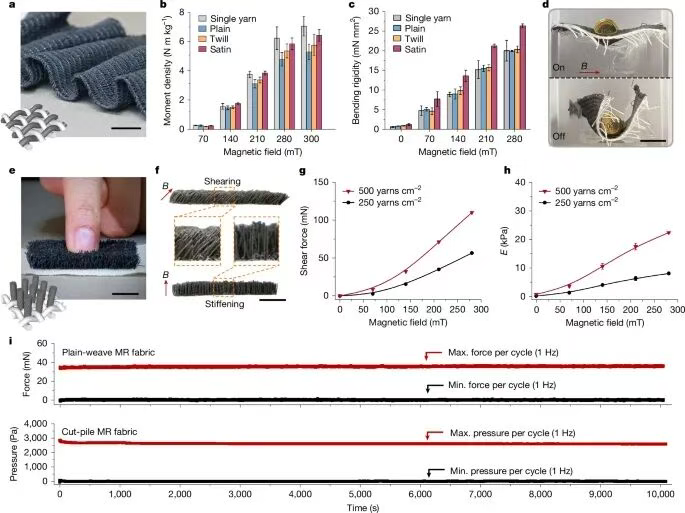 图4. 机织和剪绒 MR 织物的结构和性能
图4. 机织和剪绒 MR 织物的结构和性能
研究展示了多种应用场景。织物线性执行器通过将弯曲力矩转化为线性运动,在280 mT磁场下实现5 mm行程与150 mN输出力(图5a,b)。以此为核心的主动通风织物,通过周期性地开启弹性织物缝隙,促进微环境空气交换,其水蒸气透过率在0–2 Hz操作频率间可调,范围为34.5–58.5 g m⁻² h⁻¹(图5c,d)。集成适形抓取器利用割绒MR织物的可调模量与轴向压缩性,成功抓取并转移包括活体蠕虫、豆腐、蓝莓等多种形状与刚度差异显著的物体,展现出优异的适应性与保护性(图5e,f)。远程可控触觉指套则结合了机织与割绒MR织物,通过调节电磁场空间关系与电流参数,实现动觉与触觉反馈。例如在3 A电流下,指套可产生约3.5 N mm力矩(力矩密度2.6 N mm g⁻¹)及150 mN法向力,模拟不同织物的硬度与光滑度感知(图5g–k)。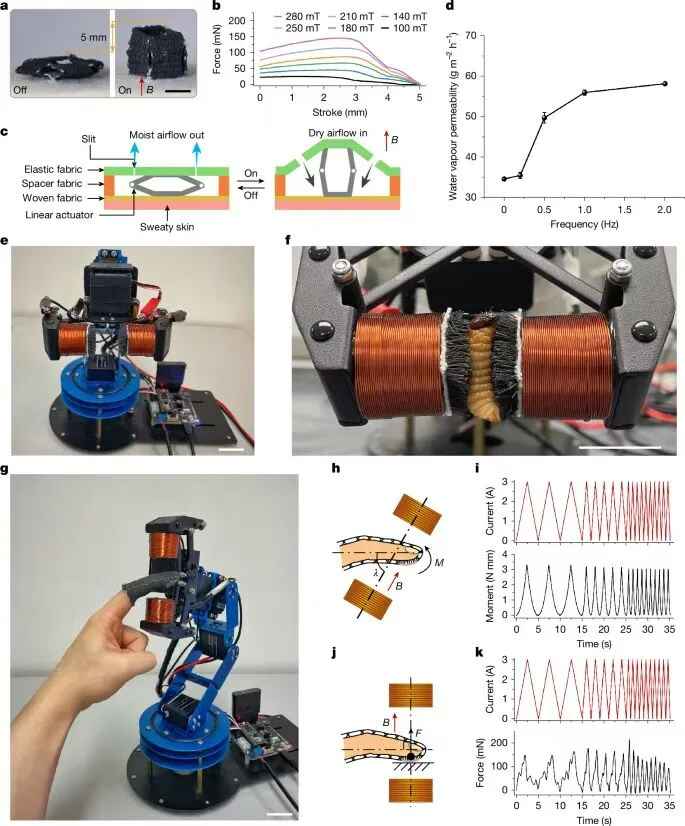 图5. 基于 MR 织物的智能纺织品演示
图5. 基于 MR 织物的智能纺织品演示
总之,本研究通过将纺织结构力学与软磁材料磁学相结合,构建了一种用于多层级纤维驱动结构的工程设计指南。研究团队采用可扩展的制备工艺,成功制备出具有多层级结构的矢量刺激响应型磁流变纤维材料。所得连续磁流变纤维长度可达公里级,直径约57 μm,磁性颗粒含量为70 wt%,在不超过300 mT、对人体安全的弱磁场下即可实现优异的取向性能。由此制得的磁流变纱线表现出6.5 N·m·kg⁻¹的高弯矩密度以及较其他刺激响应材料高出30倍的宽范围刚度调控能力。进一步地,研究团队利用这些纱线制备了机织与割绒结构的磁流变织物,展现出多样化的驱动性能,包括弯曲、剪切、线性运动及在弯曲与压缩下的刚度增强效应。最终,团队展示了多种智能纺织应用实例,如主动通风织物、柔性可调抓取装置及无线控制的全织物触觉手套。该研究不仅推动了刺激响应型材料领域的发展,也为智能纺织在日常生活及各类产业中的实际应用开辟了新途径。
原文链接
https://doi.org/10.1038/s41586-025-09706-4
来源:化学与材料科学